Technological Breakthroughs
Four firsts the industrial robot rulebook never wrote.
Functional safety for humanoid robots requires solving problems that industrial
robot standards were never written to address — an unstable platform that cannot
be safely powered down, an AI-driven control stack that is probabilistic rather
than deterministic, and a fall zone that moves with the robot.
01 · Hardware
Integrated High-Density Actuation
The Circulo drive co-locates power electronics, feedback systems and functional
safety logic inside the joint module itself — achieving torque densities up to
84.5 Nm/kg while distributing real-time safety monitoring across systems of
50+ degrees of freedom over FSoE. Each joint becomes an independent smart safety node.
02 · World First
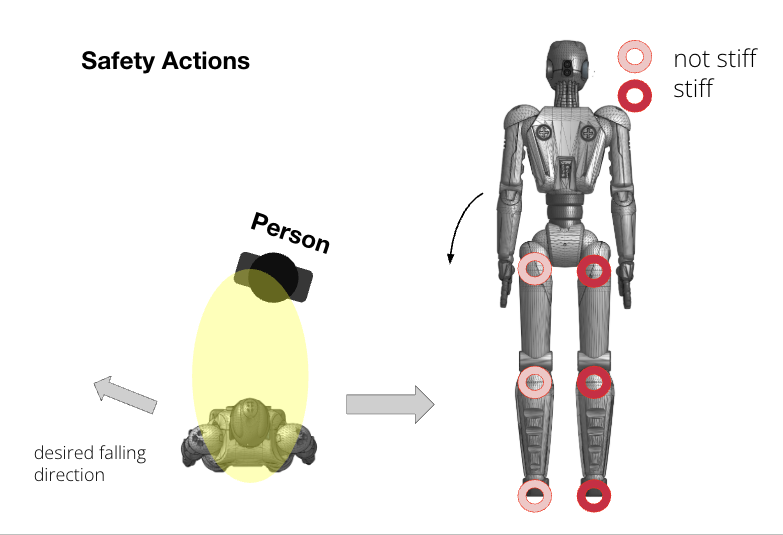
Safe Guided Falling — A New Safety Paradigm
Safe Active Damping via Active Short Circuit of the motor windings creates a
predictable electromagnetic braking effect across all joints simultaneously,
allowing the robot to collapse in a controlled, directional manner. Certified
at PLe (SIL3, Cat 3) under ISO 13849 — no equivalent in existing standards.
03 · Safety Mathematics
The Fall Zone — Extending ISO 10218-2:2025
POSITRON introduces a formally defined fall-zone parameter Sf into the
robot's separation distance calculation, a tipping-physics term derived from
robot height and instantaneous velocity. Being proposed for inclusion in
ISO/WD 25785-1.
04 · AI Supervision
Behavioral Safety for AI-Driven Platforms
An independent multimodal AI safety layer monitors the robot's operational AI
in real time, providing semantic context awareness that no purely kinematic
controller can offer. Aligned with ISO/IEC TR 5469 and ISO/IEC TS 22440 — the
emerging frameworks for functional safety applied to AI.